如果你正在运营纸飞机(纸飞机)社群,手动管理入群验证或定时发送公告简直是场灾难。实现自动化管理的核心,就是编写高效的纸飞机机器人定时任务代码。通过编写脚本,你可以让机器人自动在特定时间发布行情分析、群规提醒或签到互动,彻底告别“人工蹲守”。
选择合适的定时任务实现路径
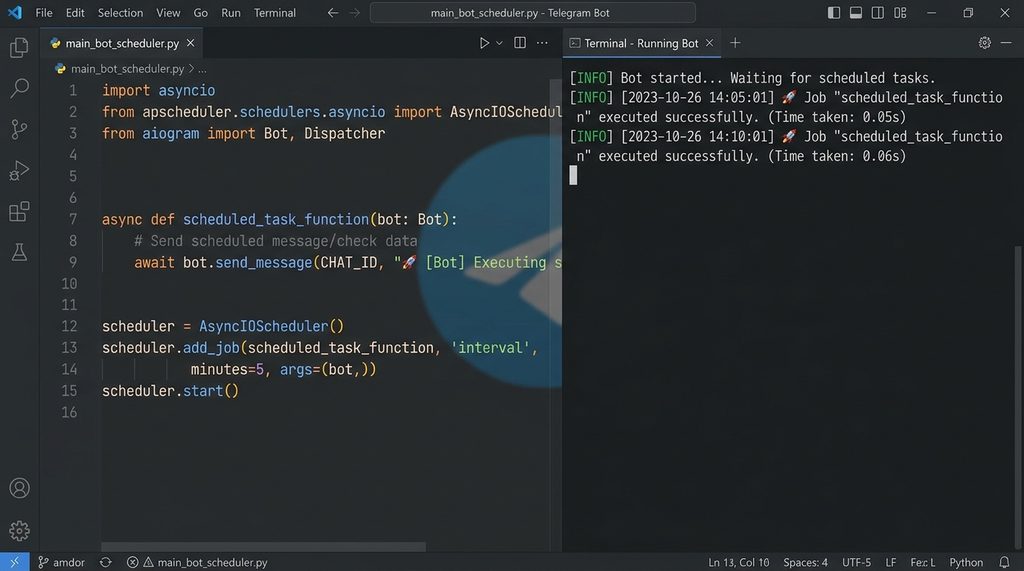
在编写纸飞机机器人定时任务代码时,开发者通常会在 Node.js 的 node-cron 库与 Python 的 APScheduler 之间犹豫。如果你追求高性能的异步处理,推荐使用 Node.js;如果你更看重脚本编写的易读性及强大的数据处理能力,Python 是绝佳选择。
以 Python 为例,核心逻辑不是简单的“死循环 + sleep”,那会导致程序在高负载下阻塞。你应该使用异步调度器来管理任务队列。这样即使某个任务执行延迟,也不会影响机器人其他功能的实时响应。
编写稳健代码的三个避坑点
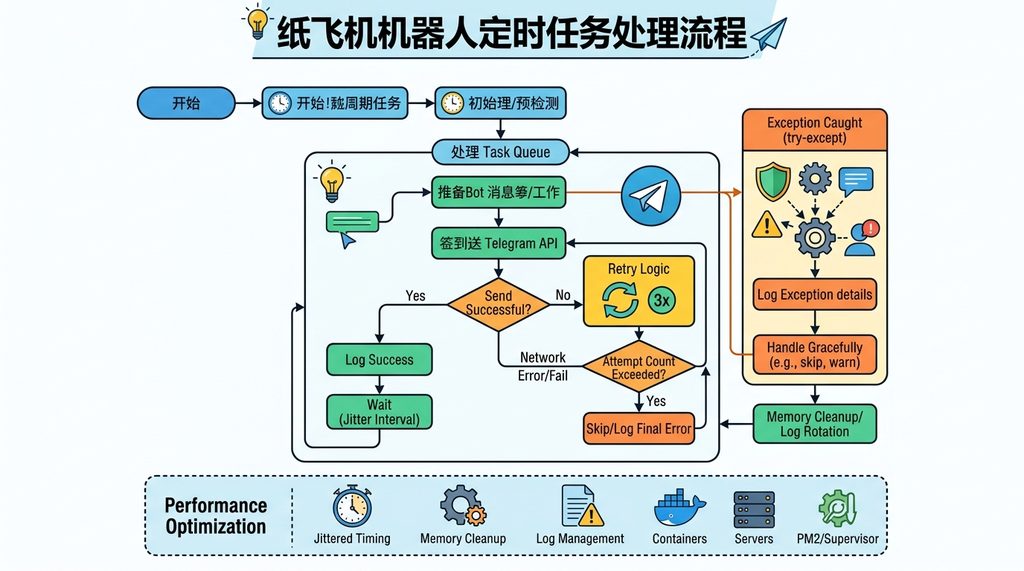
很多新手编写纸飞机机器人定时任务代码时,最容易栽跟头的就是接口频率限制(Rate Limits)。纸飞机 API 对短时间内发送消息的次数有严格控制,如果你的定时任务频率过高,账号极易被风控。
- 设置合理的间隔:不要在循环中硬编码 sleep,尽量使用调度器的 jitter(抖动)参数,错开任务触发时间。
- 处理网络抖动:网络异常时,务必加上 try-except 块。如果消息发送失败,代码应具备自动重试机制,而不是让整个任务挂掉。
- 内存占用管理:长时间运行的脚本会堆积日志,定期清理缓存和内存,否则机器人运行几天后就会变得异常迟钝。
代码优化与执行建议
在生产环境中,建议将定时任务代码部署在轻量级的 VPS 上,并通过 PM2(Node.js)或 Supervisor(Python)进行进程守护。这样即使程序意外崩溃,系统也能自动帮你重启,保证群聊管理不掉线。
另外,尽量避免在代码中写死 API Token。利用环境变量(.env文件)来存储敏感信息,这是保护机器人安全的最基本功。如果你发现机器人定时执行的时间有偏差,请检查服务器的系统时区设置,确保它是标准的 UTC 或你所在地的标准时间,避免在发送定时消息时出现“时差”尴尬。
自动化管理社群并不复杂,关键在于逻辑的严密性。从简单的定时公告起步,通过不断优化异常处理和资源调度,你能打造出一个既稳定又懂礼貌的纸飞机机器人。现在就开始动手编写你的第一段调度逻辑,让机器替你完成那些重复的工作吧。